AWORM
GradX special: Weird Robot Images!











Designer/Human intentionality always permeates, but it can be mitigated with robot agency.
AWORM is a project where Robot Agency reaches a balance with Human Intentionality by giving the robot agency in its now development process. AWORM helped to develop itself.
What is AWORM
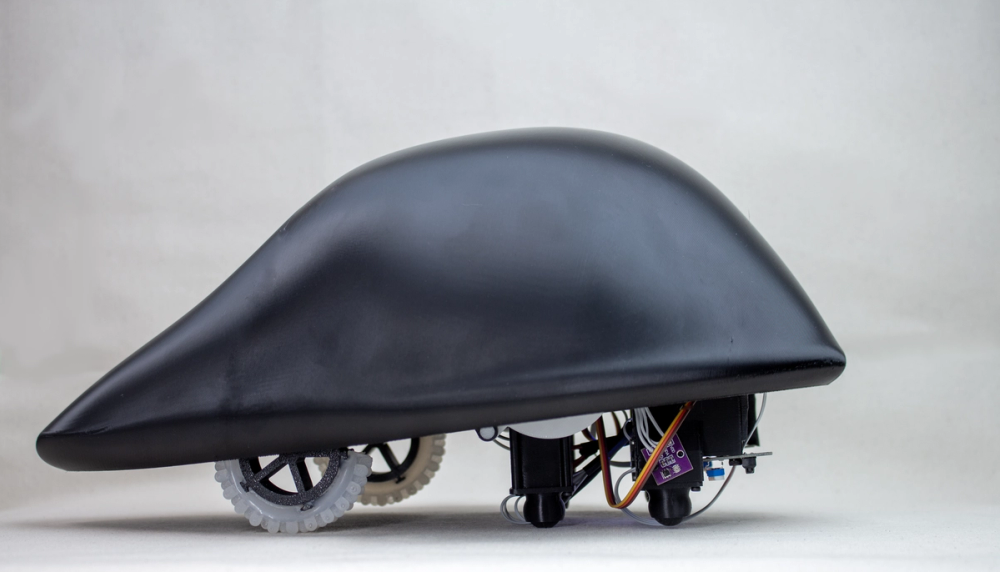
AWORM is the latest creature in the Iterative Creatures series, it is a creature-like robot that is interested in keeping its sensors maintained and calibrated.
AWORM plays with the conventional way of encountering a robot, or machines in general where people expects the machine to be useful and at their servance. AWORM is not useful, it can be helpful but ultimately it is helping itself more than any humans.
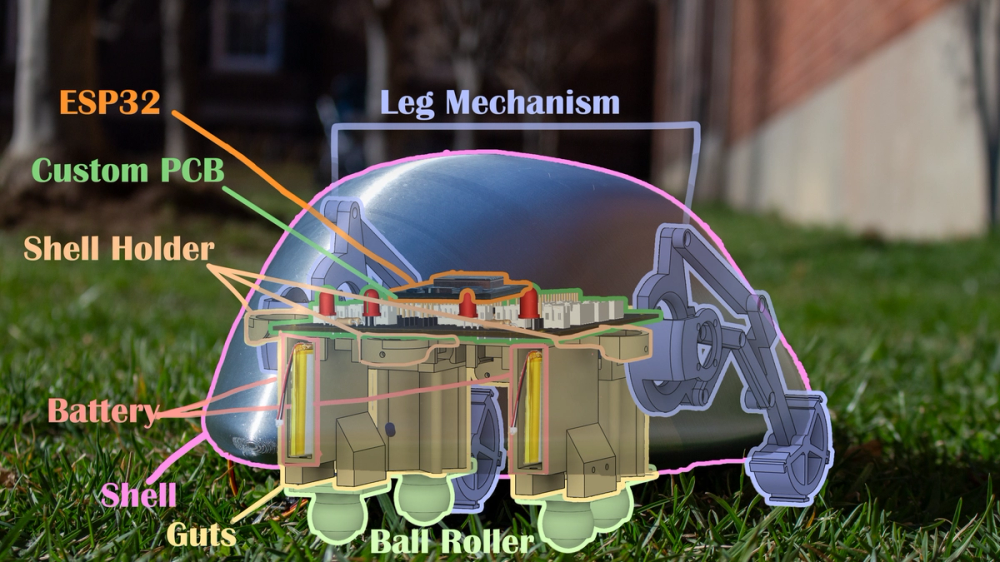
It has an accelerometer on board that provides AWORM with orientation awareness, however, due to the sensor’s hardware flaws, it experiences constant drift with cumulative error.
The goal of AWORM is to stay calibrated, in exihibition context, that means AWORM will be able to navigate safely away from the edges, edges are also the quietest spots in AWORM's understanding.
What do AWORMs Do?
AWORM is determined to keep its sensors calibrated and it has a suite of actions under its toolbelt to do so. It can:
- Go Forward
- Turn
- Go Backwards
- Stop
- Sense Cliffs
- Evaluate Sensors
- Calibrate Sensors
With this set of movements, AWORM is able to naviage a 8 ft by 8 ft platform without falling and keep its onboard acceleronmeter calibrated during DFX.
The general flow of movement looks something like this:
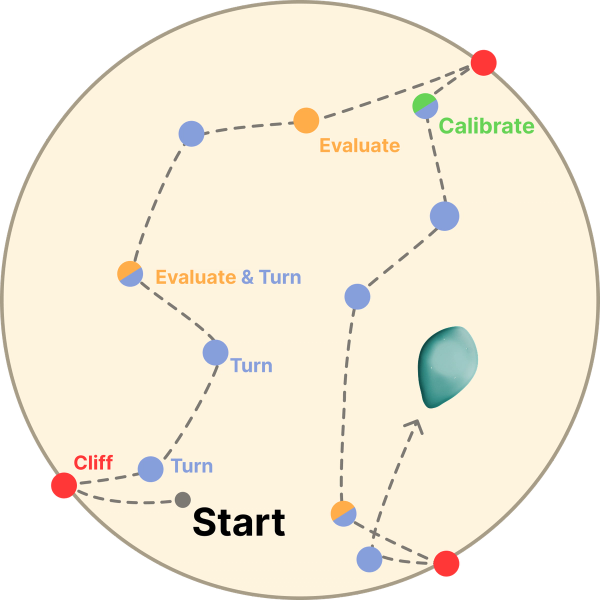
It will try to keep itself from falling, while stay as close as possible to the edges where is most "habitable". In which, it can conduct self-calibration undisturbed.
Context
AWORM works within a few different contextual backgrounds. It is a piece of very simple Hardware Artificial Life, under the embodied robot category, it is also in the discourse of HCI where it offers an alternative way for HCI where people needs to tap into AWORM's sensors instead of have AWORM's sensor built round people's input.
AWORM's Goal
AWORM’s goal
is developed through an iterative process where it went through 2 major iteration and dozens of miner modifications with the human designer. The development process shifts the conventional designer and designed-object hierarchy to a collaborative journey between them, creating a shared experience and agency between robot and human.
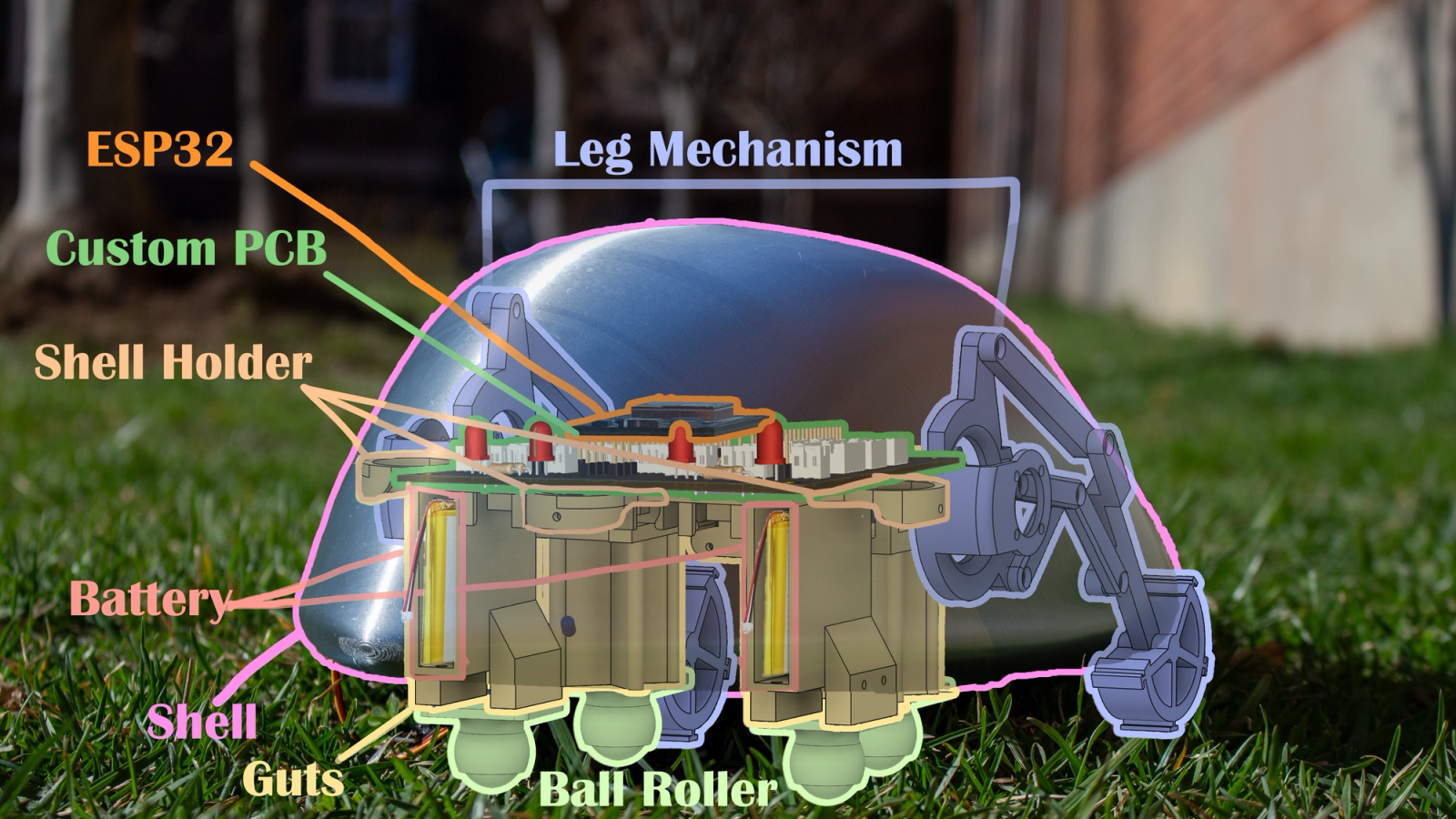
With the use of a specialize Iterative Loop, and by having an opaque shell on AWORM, the designer is forced to observe and to make assumptions instead of having direct access to its internal states when AWORM is being tested and developed.
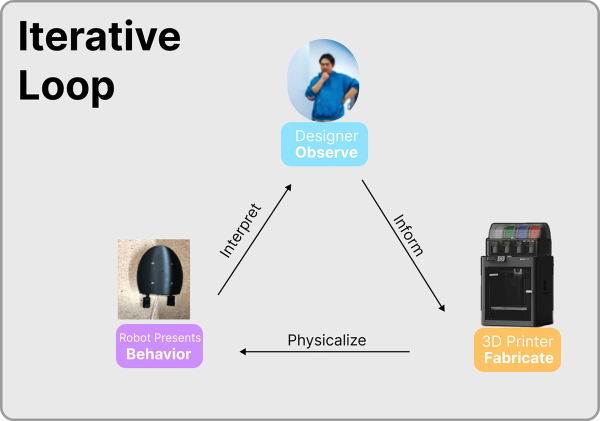
This grants AWORM agency in its own development process, it can shape its own development process by presenting different behaviors, where those behaviors will be interpreted by the designer and making improvements based on observations, rather than being shaped solely by the designer's intentionality.
Iterative Map
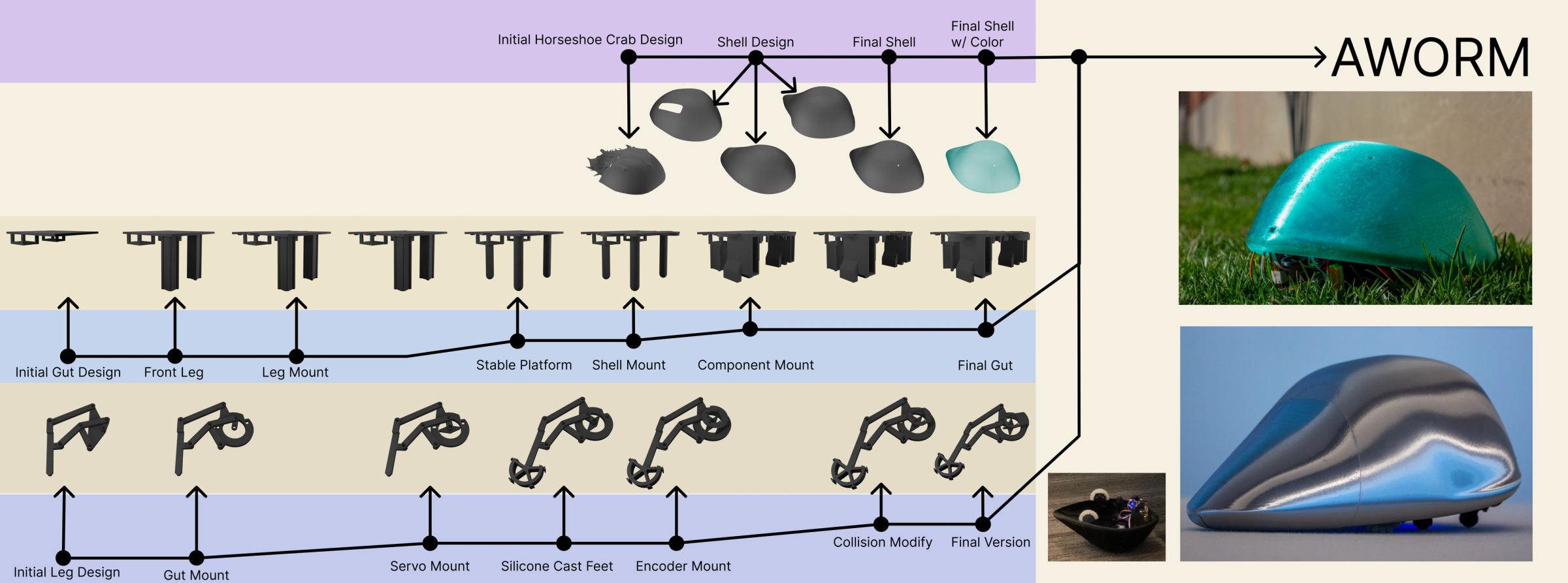
Each iteration is a "conversation" done between the robot and the designer, each have their own concerns, and by collaborating on AWORM, their concerns materialized into phyiscal world with 3D printing tehcnology.
Previous Iteration
AWORM started with something more wobbly. It started as a spherical creature that wobbles around rather than walks around.
